- 您现在的位置:买卖IC网 > Sheet目录317 > CAT24C21LI (ON Semiconductor)IC EEPROM SERIAL 1KB DUAL 8PDIP
�� �
�
�CAT24C21�
�Bi� ?� Directional� Mode� (DDC2)�
�The� following� defines� the� features� of� the� I� 2� C� bus� protocol�
�in� bi� ?� directional� mode� (Figure� 5):�
�1.� Data� transfer� may� be� initiated� only� when� the� bus� is�
�not� busy.�
�2.� During� a� data� transfer,� the� data� line� must� remain�
�stable� whenever� the� clock� line� is� high.� Any�
�changes� in� the� data� line� while� the� clock� line� is� high�
�will� be� interpreted� as� a� START� or� STOP� condition.�
�When� in� the� bi� ?� directional� mode,� all� inputs� to� the� VCLK�
�pin� are� ignored,� except� when� a� logic� high� is� required� to�
�enable� write� capability.�
�START� Condition�
�The� START� condition� (Figure� 7)� precedes� all� commands�
�to� the� device,� and� is� defined� as� a� HIGH� to� LOW� transition�
�of� SDA� when� SCL� is� HIGH.� The� CAT24C21� monitors� the�
�SDA� and� SCL� lines� and� will� not� respond� until� this� condition�
�is� met.�
�STOP� Condition�
�A� LOW� to� HIGH� transition� of� SDA� when� SCL� is� HIGH�
�determines� the� STOP� condition.� All� operations� must� end�
�with� a� STOP� condition.�
�Device� Addressing�
�The� bus� Master� begins� a� transmission� by� sending� a�
�START� condition.� The� Master� then� sends� the� address� of� the�
�particular� slave� device� it� is� requesting.� The� four� most�
�significant� bits� of� the� 8� ?� bit� slave� address� are� fixed� as� 1010�
�for� the� CAT24C21� (see� Figure� 9).� The� next� three� significant�
�bits� are� “don’t� care”.� The� last� bit� of� the� slave� address�
�specifies� whether� a� Read� or� Write� operation� is� to� be�
�performed.� When� this� bit� is� set� to� 1,� a� Read� operation� is�
�selected,� and� when� set� to� 0,� a� Write� operation� is� selected.�
�After� the� Master� sends� a� START� condition� and� the� slave�
�address� byte,� the� CAT24C21� monitors� the� bus� and� responds�
�with� an� acknowledge� (on� the� SDA� line)� when� its� address�
�matches� the� transmitted� slave� address.� The� CAT24C21� then�
�performs� a� Read� or� Write� operation� depending� on� the� state�
�of� the� R/� W� bit.�
�Acknowledge�
�After� a� successful� data� transfer,� each� receiving� device� is�
�required� to� generate� an� acknowledge� (ACK).� The�
�acknowledging� device� pulls� down� the� SDA� line� during� the�
�ninth� clock� cycle,� signaling� that� it� has� received� the� 8� bits� of�
�data� (Figure� 8).�
�The� CAT24C21� responds� with� an� ACK� after� receiving� a�
�START� condition� and� its� slave� address.� If� the� device� has�
�been� selected� along� with� a� write� operation,� it� responds� with�
�an� ACK� after� receiving� each� 8� ?� bit� byte.�
�When� the� CAT24C21� is� in� a� READ� mode� it� transmits� 8�
�bits� of� data,� releases� the� SDA� line,� and� monitors� the� line� for�
�an� ACK.� Once� it� receives� this� ACK,� the� CAT24C21� will�
�continue� to� transmit� data.� If� no� ACK� is� sent� by� the� Master,�
�the� device� terminates� data� transmission� and� waits� for� a�
�STOP� condition.�
�Write� Operations�
�VCLK� must� be� held� high� in� order� to� program� the� device.�
�This� applies� to� byte� write� and� page� write� operation.� Once� the�
�device� is� in� its� self� ?� timed� program� cycle,� VCLK� can� go� low�
�and� not� affect� programming.�
�Byte� Write�
�In� the� Byte� Write� mode� (Figure� 10),� the� Master� device�
�sends� the� START� condition� and� the� slave� address�
�information� (with� the� R/� W� bit� set� to� zero)� to� the� Slave�
�device.� After� the� Slave� generates� an� ACK,� the� Master� sends�
�the� byte� address� that� is� to� be� written� into� the� address� pointer�
�of� the� CAT24C21.� After� receiving� another� ACK� from� the�
�Slave,� the� Master� device� transmits� the� data� byte� to� be� written�
�into� the� addressed� memory� location.� The� CAT24C21�
�acknowledges� once� more� and� the� Master� generates� the�
�STOP� condition,� at� which� time� the� device� begins� its� internal�
�programming� cycle� to� nonvolatile� memory� (Figure� 6).�
�While� this� internal� cycle� is� in� progress,� the� device� will� not�
�respond� to� any� request� from� the� Master� device.�
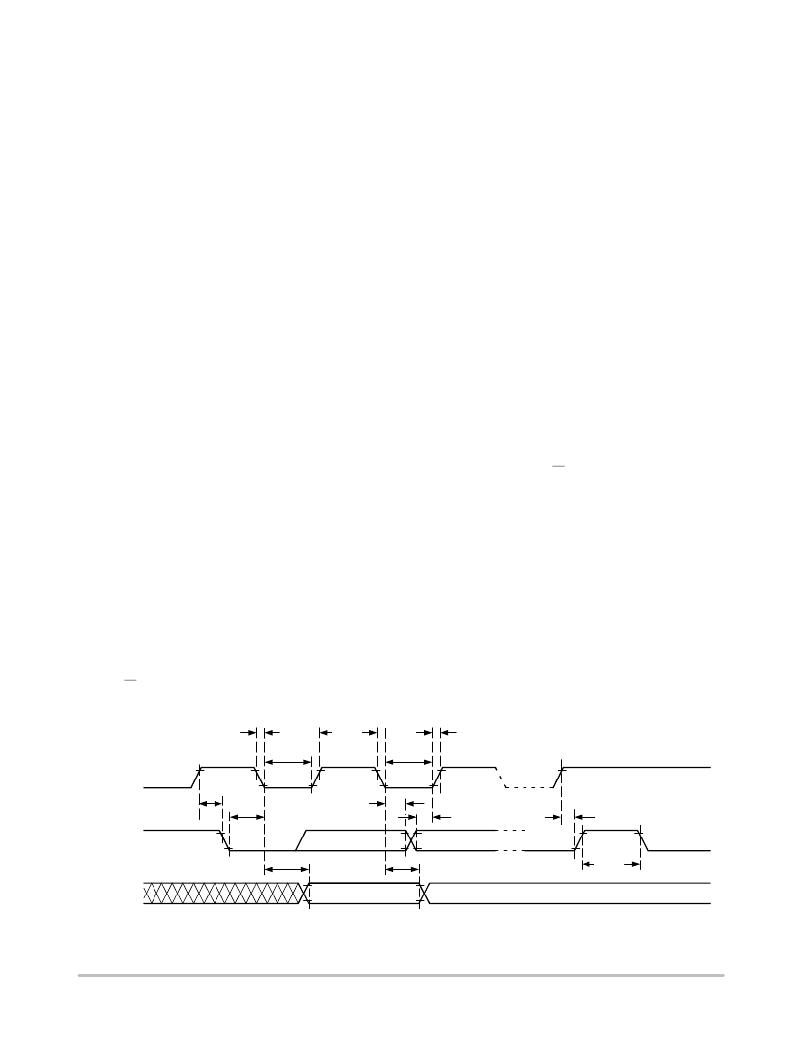
�SCL�
�t� F�
�t� LOW�
�t� HIGH�
�t� LOW�
�t� R�
�t� SU:STA�
�t� HD:STA�
�t� HD:DAT�
�t� SU:DAT�
�t� SU:STO�
�SDA� IN�
�t� AA�
�t� DH�
�t� BUF�
�SDA� OUT�
�Figure� 5.� Bus� Timing�
�http://onsemi.com�
�5�
�发布紧急采购,3分钟左右您将得到回复。
相关PDF资料
CAT24C256XI-T2
IC EEPROM 256KBIT 400KHZ 8SOIC
CAT24C32HU3I-GT3
IC EEPROM 32KB I2C SERIAL 8UDFN
CAT24C32TSI-T3
IC EEPROM SRL 32KB I2C 5TSOP
CAT24C512HU5IGT3
IC EEPROM SRL 512KB I2C 8UDFN
CAT24C512XI
IC EEPROM I2C SRL 512KB 8SOIC
CAT24C64ZI-GT3
IC EEPROM I2C SRL 64KB 8MSOP
CAT24M01XI
IC EEPROM I2C SRL 1MB 8SOIC
CAT24M01YI-GT3
IC EEPROM SRL 1MB I2C 8TSSOP
相关代理商/技术参数
CAT24C21WGI
制造商:Rochester Electronics LLC 功能描述: 制造商:Catalyst Semiconductor 功能描述:
CAT24C21WGI-T3
制造商:Rochester Electronics LLC 功能描述: 制造商:Catalyst Semiconductor 功能描述:
CAT24C21WI
功能描述:电可擦除可编程只读存储器 1K Dual Mode Serial RoHS:否 制造商:Atmel 存储容量:2 Kbit 组织:256 B x 8 数据保留:100 yr 最大时钟频率:1000 KHz 最大工作电流:6 uA 工作电源电压:1.7 V to 5.5 V 最大工作温度:+ 85 C 安装风格:SMD/SMT 封装 / 箱体:SOIC-8
CAT24C21WI-G
制造商:Rochester Electronics LLC 功能描述: 制造商:ON Semiconductor 功能描述:
CAT24C21WI-GT3
功能描述:电可擦除可编程只读存储器 1K DUAL MODE SER 电可擦除可编程只读存储器 RoHS:否 制造商:Atmel 存储容量:2 Kbit 组织:256 B x 8 数据保留:100 yr 最大时钟频率:1000 KHz 最大工作电流:6 uA 工作电源电压:1.7 V to 5.5 V 最大工作温度:+ 85 C 安装风格:SMD/SMT 封装 / 箱体:SOIC-8
CAT24C21WI-T3
制造商:ON Semiconductor 功能描述:1K DUAL MODE SERIAL EEPROM - Tape and Reel
CAT24C21ZI
制造商:Catalyst Semiconductor 功能描述:
CAT24C256HU4IGT3
功能描述:电可擦除可编程只读存储器 LOW-SATURATION VOLTAGE RoHS:否 制造商:Atmel 存储容量:2 Kbit 组织:256 B x 8 数据保留:100 yr 最大时钟频率:1000 KHz 最大工作电流:6 uA 工作电源电压:1.7 V to 5.5 V 最大工作温度:+ 85 C 安装风格:SMD/SMT 封装 / 箱体:SOIC-8